Snakes#
This example shows how we can simulate the snakes described in [Penty et al., 2025]:
“Controllable gliders in a nanomagnetic metamaterial.” Nature Communications 16, 2025.
We start by creating a model of a 30x30 pinwheel ASI
from flatspin.model import PinwheelSpinIceDiamond
import numpy as np
params = dict(
size=(30, 30),
use_opencl=1,
spin_angle=-45,
spin_axis=0,
alpha=0.0013,
hc=0.2,
sw_b=0.38,
sw_c=1,
sw_beta=1.3,
sw_gamma=3.6,
)
model = PinwheelSpinIceDiamond(**params)
# Define drawing style
style = dict(style="stadium", width=.25, scale=1.3)
We can make a convenience function which allows us to easily draw snakes at different positions in the ASI
def init_snake(model, length, pos):
G = model.grid()
y, x = pos
grid_inds = [(y, x+i) for i in range(2*length)]
grid_inds += [(y+1, x+i+1) for i in range(2*length)]
spin_inds = [G.point_index(gi) for gi in grid_inds]
spin_inds = np.concatenate(spin_inds)
model.spin[spin_inds] = 1
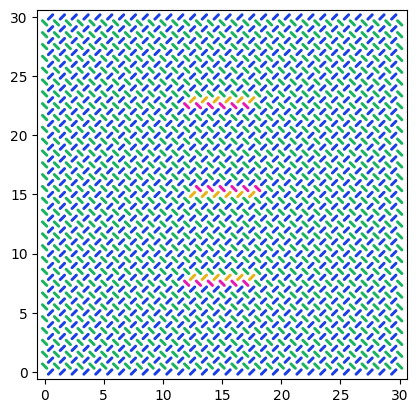
# polarize then draw some snakes
model.polarize(-1)
init_snake(model, 6, (15, 24)) # Leftwards snake
init_snake(model, 6, (30, 24)) # Rightwards snake
init_snake(model, 6, (45, 24)) # Leftwards snake
model.plot(**style);
To get the snake moving we need to use Astroid Clocking.
We can use the flatspin PulseTrain Encoder to create a sequence of global fields to apply
# Set up clock fields and encoder
from flatspin.encoder import PulseTrain
H_AB = 0.0765
H_ab = 0.072
pulses={
"A": (H_AB, 22), # (field strength, angle)
"a": (H_ab, 180+22),
"B": (H_AB, -22),
"b": (H_ab, 180-22)
}
encoder = PulseTrain(pulses=pulses)
from flatspin.plotting import animate_spins
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
from IPython.display import HTML
sequence = "ABab" * 14
h_ext = encoder(list(sequence))
spins = [model.spin.copy()]
for h_ext_i in h_ext:
model.set_h_ext(h_ext_i)
model.relax()
spins.append(model.spin.copy())
labels = ["init"] + list(sequence)
anim = animate_spins(model, spins, labels, highlight_flips=True, fps=5, **style)
plt.close() # Only show the animation
HTML(anim.to_jshtml())